






Advanced Platform Technology Center



Advanced Exoskeletons for Independent Mobility
 Paralysis, muscle weakness, and lack of coordination are common consequences of combat related injury to the central nervous or musculoskeletal systems that can prevent a return to active duty or independent performance of essential activities of daily living. APT Center Investigators continue to improve the design, fabrication and testing of the bracing systems consisting of unique electromechanical joints that lock and unlock in coordination with voluntary or stimulated muscle contractions to restore or assist independent walking and upright mobility.
Paralysis, muscle weakness, and lack of coordination are common consequences of combat related injury to the central nervous or musculoskeletal systems that can prevent a return to active duty or independent performance of essential activities of daily living. APT Center Investigators continue to improve the design, fabrication and testing of the bracing systems consisting of unique electromechanical joints that lock and unlock in coordination with voluntary or stimulated muscle contractions to restore or assist independent walking and upright mobility.
A first generation prototype neuromechanical gait assist system combined electrical stimulation to the paralyzed lower extremity muscles with a controllable hydraulic exoskeleton for standing, walking, and stair climbing for individuals with spinal cord injuries. The system consisted of computer controlled hydraulic knee and hip mechanisms that allowed the lower extremity joints to either move during walking or be fixed during weight bearing to let the muscles rest. 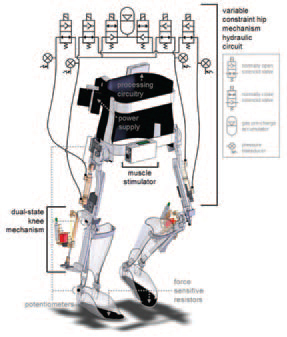 The system showed the potential to improve the stability and posture of individuals with paraplegia as compared to walking with electrical stimulation alone, and also reduce user effort and increased walking speed when compared to standard reciprocal braces.
The system showed the potential to improve the stability and posture of individuals with paraplegia as compared to walking with electrical stimulation alone, and also reduce user effort and increased walking speed when compared to standard reciprocal braces.
The project is advancing the design to make it self-contained and suitable for independent use and clinical testing outside the laboratory. Efforts are directed toward reducing the size and weight of the exoskeleton, repackaging the electronics and refining the control system to include natural coupling of hip and knee motion and damping of knee flexion during loading. These improvements should improve foot-floor and step clearance during walking and stair climbing, and provide smoother and more natural gait and stair descent. Completion of this project may define a new means to overcome physical barriers and manage uneven terrain, thus enabling ambulation in a wide variety of physical environments to improve access.
Principal Investigators: Rudi Kobetic, M.S.• Ronald Triolo, Ph.D.
Clinical Collaborators: Gilles Pinault, M.D. • Stephen Selkirk, M.D.
Funding Agencies: Veterans’ Affairs Rehabilitation Research and Development; Department of Defense
![]()






